
- 27
- Sep
Apakah struktur pelindapkejutan relau pemanasan aruhan raceway bantalan slewing yang besar?
Apakah struktur pelindapkejutan relau pemanasan aruhan raceway bantalan slewing yang besar?
Oleh kerana diameter besar landasan lumba balap tradisional galas dalam dan luar, pelindapkejutan pengimbas frekuensi 4 ~ 30kHz biasanya digunakan untuk pengerasan induksi, dan zon peralihan (zon lembut) kira-kira 30mm biasanya tersisa di antara titik permulaan dan akhir pelindapkejutan.
Tempat tidur mesin quenching raceway bearing slewing awal sering digunakan untuk pelindapkejutan di relau pemanasan induksi gear yang besar, yang dapat memadamkan gigi tunggal dan mengimbas dan memadamkan landasan pacu. Secara amnya, serupa dengan pelarik menegak, gear diletakkan secara mendatar. Kemudian ditingkatkan menjadi kemiringan 75. Mudah dioperasikan dan cairan pendinginan mengalir keluar, seperti yang ditunjukkan pada Gambar 8-48.
Untuk memudahkan pengerasan gigi tunggal gigi dan pelepasan lintasan lumba, sebuah syarikat pemanas induksi Jerman telah membangunkan pelindapkejutan relau pemanasan jenis RHM-5 yang dapat mengeraskan landasan lumba dengan gear serong dan mendatar. Diameter bahan kerja boleh mencapai 6m, beratnya boleh mencapai 20t.
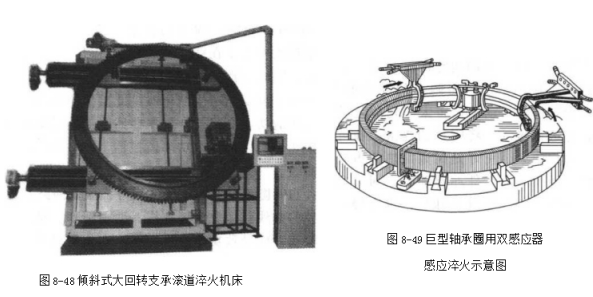
Dalam tahun-tahun kebelakangan ini, dengan perkembangan industri tenaga angin, pengerasan landasan slewing bearing yang mengeras tanpa tali pinggang lembut sekali lagi menjadi projek R&D utama syarikat pemanas induksi. Seawal tahun 1950-an, bekas Kesatuan Soviet mencadangkan untuk menggunakan dua sensor untuk mengimbas ke arah yang bertentangan dari titik permulaan untuk cincin galas gergasi. Akhirnya, kedua sensor bergabung, dan penyelesaiannya diselesaikan dengan menyemburkan pelindapkejutan cecair di titik pertemuan. Masalah tali pinggang lembut ditunjukkan dalam Rajah 8-49.
Pada masa ini, tungku pemanasan induksi baru untuk pelindapkejutan bantalan berputar telah dikembangkan di dalam dan luar negara. Ia dapat menghubungkan lapisan yang mengeras dari hujung ke hujung tanpa tali yang lembut. Mekanisme ini serupa dengan Gambar 849. Kedua-dua sensor mengimbas ke arah yang bertentangan dari titik permulaan, dan dua sensor terakhir bergabung. Pada titik penumpuan, penyembur cecair melakukan pelindapkejutan cecair. Walau bagaimanapun, reka bentuk alat mesin sangat pintar, seperti yang ditunjukkan pada Gambar 8-50. Ia seperti kren balok dengan dua sistem beban. Sensor dapat bergerak ke atas dan ke bawah, kiri dan kanan, dan kren dapat bergerak bolak-balik, membentuk ruang pergerakan tiga dimensi. Oleh itu, ia dapat mengendalikan jalan lumba dengan diameter dan ketinggian yang berbeza.
Untuk peleburan litar berdiameter lebih kecil, terdapat juga mesin pelindapkejutan yang memutar benda kerja pada kelajuan tinggi dan memanaskannya dengan lebih dari satu induktor. Apabila semua permukaan pacu mencapai suhu pelindapkejutan, mereka disembur pada masa yang sama, sehingga tidak ada kelembutan yang dapat diperoleh. Lapisan tali pinggang yang mengeras.
