
- 08
- Aug
Dây chuyền sản xuất làm nguội lò sưởi cảm ứng bánh răng tần số kép hoạt động như thế nào?
Làm thế nào để bánh răng tần số kép làm nguội lò sưởi cảm ứng dây chuyền sản xuất làm việc?
Công ty TOCC0 của Mỹ đã từng thiết kế và sản xuất dây chuyền sản xuất dập tắt và làm nguội lò cảm ứng tần số kép cho bánh răng bên trong và bánh răng mặt trời cho một nhà máy truyền động. Dây chuyền sản xuất này bao gồm hai nguồn điện thể rắn tần số trung gian 100kW, 10kHz, một cho bánh răng bên trong và một cho bánh răng mặt trời; nguồn điện tần số cao là 200kW, 450kHz.
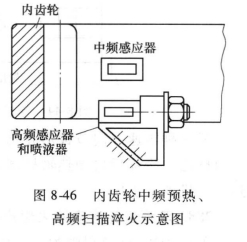
Làm nguội và tôi luyện các bánh răng bên trong Các bánh răng bên trong của dây chuyền sản xuất này được dỡ từng mảnh một và được vận hành bởi hai xi lanh đối diện. Khi phôi ở vị trí nạp số 1, một công tắc tiệm cận sẽ tác động làm cho thanh pittông khí nén đẩy phôi đến trạm dập tắt. Trạm này có một servo tốc độ thay đổi và khung quét dọc, bánh răng tới trạm làm nguội và trạm khác Công tắc tiệm cận hoạt động, do đó, máy quét dọc nâng bánh răng bên trong khỏi thanh pittông và đặt phôi ở vị trí định hướng bên dưới cảm biến. Có hai công tắc khoảng cách được sử dụng như một chỉ báo định vị chuyên dụng. Nếu đặt sai vị trí, phôi đó sẽ quay trở lại thanh pittông để nạp lại. Sai vị trí Là, máy công cụ ngừng chạy và đồng thời, màn hình hiển thị chẩn đoán cho biết phôi không ở trong trạm dập tắt. Nếu bánh răng bên trong được đặt đúng vị trí và được trạm định hướng phôi chấp nhận, cơ cấu quét sẽ gửi nó đến cảm biến. Khi cảm biến được đặt trong bánh răng bên trong, nguồn điện tần số trung gian bắt đầu làm nóng, phôi quay và cơ chế quét hạ thấp phôi, để cảm biến quét và làm nóng trước toàn bộ chiều dài của bánh răng bên trong. Sơ đồ của quá trình gia nhiệt sơ bộ tần số trung gian bánh răng bên trong và dập tắt quét tần số cao được thể hiện trong Hình 8-46.
Sau khi hoàn thành gia nhiệt sơ bộ tần số trung gian, bộ định vị quét tăng và trở lại vị trí ban đầu, công tắc nguồn được chuyển sang nguồn điện tần số cao, phôi quay xuống một lần nữa, và bánh răng được làm nóng trước được quét và làm nguội với tần số cao. Sau khi bánh răng bên trong được làm nguội đi xuống thanh pittông, thanh pittông đẩy phôi đến trạm tôi và hoạt động của tín hiệu định vị của nó cũng giống như hoạt động của trạm tôi. Ủ là phương pháp gia nhiệt một lần, phôi quay trong quá trình tôi luyện và công suất luyện nhỏ, và nó được thực hiện trong giai đoạn tôi cứng bánh răng với tần số cao.
Sau khi hoàn thành quá trình tôi luyện, bánh răng được hạ xuống thanh pittông và được đẩy đến trạm làm mát, được đầu phun làm nguội đến nhiệt độ không tải và sau đó phôi được đẩy đến trạm kiểm tra phụ (đủ tiêu chuẩn hoặc bị loại ). Sự từ chối được xác định bởi nhiều thiết bị phát hiện. Nếu bánh răng bên trong được xác định là bị loại bỏ, một thanh xả khí nén được lắp bên cạnh sẽ đẩy bánh răng theo chiều ngang và trượt đến hộp xả loại bỏ. Nếu thiết bị đủ điều kiện, sau đó Đẩy đến hộp xả.
(2) Quá trình dập tắt và tôi luyện của bánh răng Mặt trời Sơ đồ làm nguội tần số kép của bánh răng mặt trời được thể hiện trong Hình 8-47.
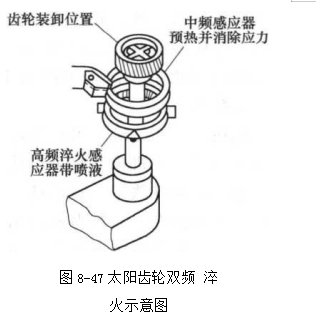
Trong quá trình gia nhiệt sơ bộ tần số trung gian và gia nhiệt tần số cao, phôi sẽ quay. Sau khi gia nhiệt tần số cao, chất lỏng dập tắt được phun ra từ cuộn cảm kết hợp. Do đặc điểm cấu tạo của bánh răng mặt trời, chất lỏng làm nguội phải được loại bỏ trước khi đưa vào trạm ủ. Có một trạm lắc nhẹ thiết bị làm việc nâng bánh răng mặt trời lên 110. Góc và lắc để loại bỏ chất lỏng làm nguội kèm theo. Quá trình tôi luyện sử dụng tần số trung gian, đây là khoảng thời gian để làm nóng với tần số cao của bánh răng này. Trong quá trình tôi luyện, phôi cũng quay và bánh răng được tôi luyện đi vào trạm làm mát. Sau khi phun làm mát, nó lại lắc nhẹ. Sau khi khử nước, nó đi vào trạm kiểm tra để phân loại đủ tiêu chuẩn và loại bỏ.
(3) Thiết bị phát hiện và điều khiển của nó. Tốc độ quét, chu kỳ gia nhiệt và làm mát dập tắt được điều khiển bởi lập trình viên (Modicon 984), cũng như các thẻ đầu vào và đầu ra, và bộ lập trình (480
Gould), bộ điều khiển servo (410 Gould), bộ điều khiển động cơ DC được sử dụng để điều khiển tốc độ quay của phôi. Bộ điều khiển servo được sử dụng để điều khiển tốc độ quét, màn hình chẩn đoán lỗi hiển thị lỗi và màn hình năng lượng cung cấp năng lượng thực. Các cảm biến dập tắt và ủ có bảo vệ nối đất. Nếu phôi va chạm với cảm biến, lỗi sẽ hiển thị trên màn hình và máy công cụ sẽ ngừng hoạt động.
(4) Hệ thống làm mát nước bao gồm một máy bơm nước bằng thép không gỉ, một bộ trao đổi nhiệt dạng tấm, một công tắc phao, một bộ theo dõi nhiệt độ nước và một van điều nhiệt tự động.
